bustub 项目历程
从去年十月初到今年一月中旬,历时一个学期,在实验室的安排下着手开始 CMU 15445 23fall 的数据库知识的学习和 Project 的实现,终于在过年前完成所有的 Project。正好寒假在家有时间,就着手建了一个个人博客,写一下我在实现 Project 过程中遇到的问题和收获。关于课程视频,我时间有限,就只看了前几个视频,如果有同学感兴趣,还是推荐看一下,理论知识的学习还是很重要的。
前言
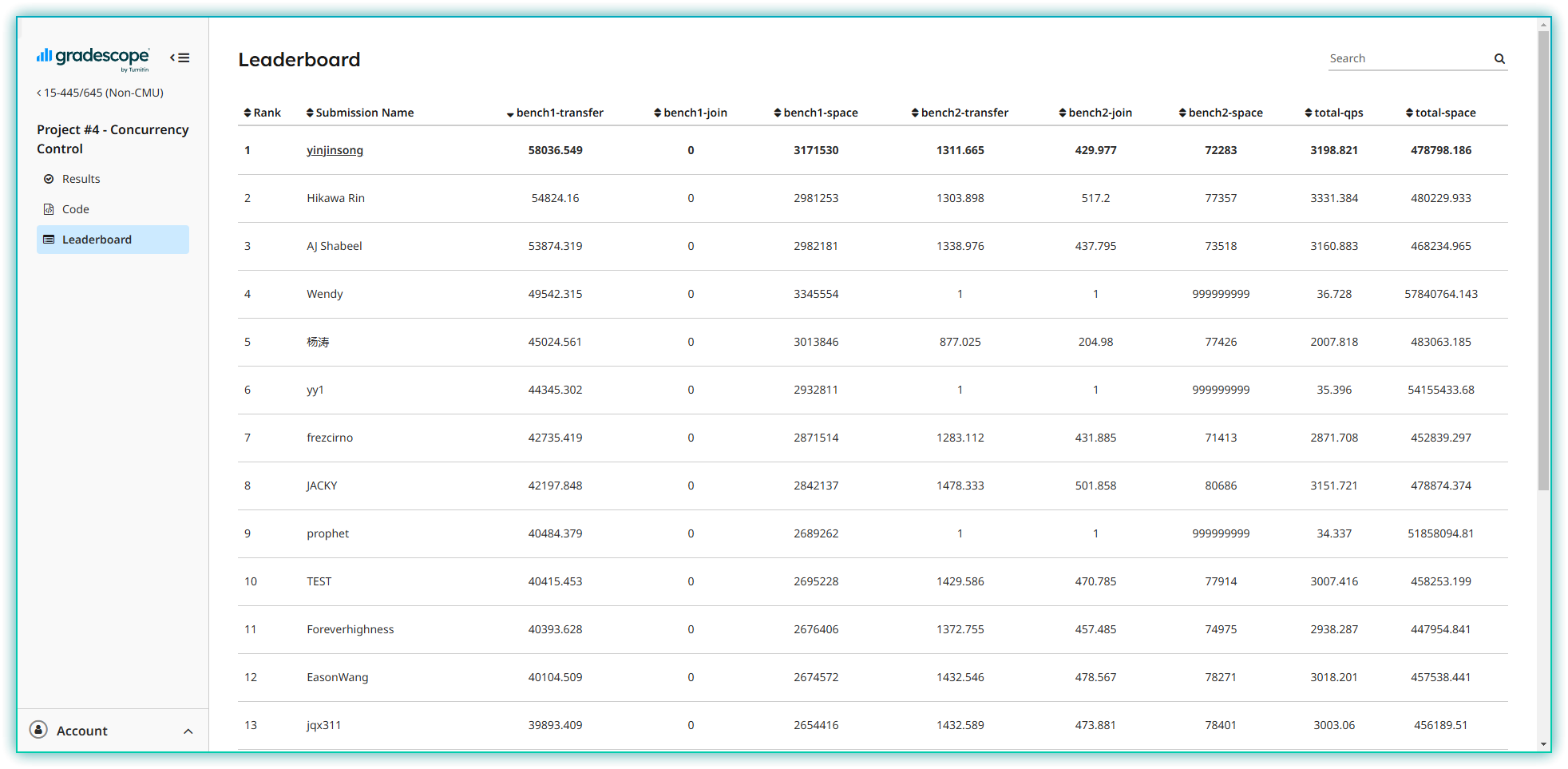
老规矩,先看一下最终排名,截止 2025/02/10,总分第 7,单榜第 1,打开 LeaderBoard 第一个就是我了(嘿嘿)
个人认为 project4 完全做完应该是 4 个 project 中最难的,花的时间也是最多的。不过开始写的时候刚好考试比较多,没多少时间写,大概花了几天时间把前几个 task 完成了,最后在考试完后回家写了几天才写完。虽然可能没写太久,但是感觉花费的精力挺多的。
一、MVCC 理论基础
1.1 什么是 MVCC?
MVCC(Multi-Version Concurrency Control,多版本并发控制) 是数据库系统中最主流的并发控制机制之一。其核心思想是:每次写操作不覆盖旧数据,而是创建数据的一个新版本;读操作通过时间戳(或版本号)找到它"应该"看到的历史版本。
这样的设计带来了关键特性:读操作不会阻塞写操作,写操作不会阻塞读操作,读写之间完全不争锁,从根本上解决了传统 2PL(Two-Phase Locking)中读写互斥的性能瓶颈。
1.2 MVCC 与 2PL 的对比
| 维度 | 2PL(两阶段锁) | MVCC |
|---|---|---|
| 读写关系 | 读写互斥(S 锁 / X 锁) | 读写不互斥 |
| 写写关系 | 写写阻塞等待 | 写写冲突 → abort(First-Writer-Wins) |
| 死锁风险 | 存在(需要死锁检测/预防) | 无死锁(通过 abort 解决) |
| 历史版本 | 不保留 | 保留多版本(UndoLog 链) |
| 实现复杂度 | 锁管理复杂 | 版本链管理、GC 复杂 |
| 典型系统 | InnoDB(历史版本同时也用 MVCC) | PostgreSQL, MySQL InnoDB, BusTub |
| 读性能 | 受写锁阻塞 | 高(始终读快照) |
| 写吞吐 | 并行度受限 | 高并发(短事务) |
补充:现代工业级数据库如 MySQL InnoDB 同时使用 2PL 和 MVCC:2PL 保证当前读(
SELECT FOR UPDATE)的正确性,MVCC 提升普通读(快照读)的性能。BusTub 的实现更接近纯 MVCC(读不加锁)。
1.3 Snapshot Isolation(快照隔离)
快照隔离(SI) 是 MVCC 提供的最常见隔离级别,其核心保证:
每个事务在 Begin 时刻看到一个数据库的一致性快照,此后该事务只能看到这个快照中的数据,以及自身写入的数据。
SI 的正式定义(三个约束):
- Snapshot Read:事务 T 读到的是所有在 T.read_ts 之前已提交的数据版本
- Consistent Snapshot:所有可见数据在同一时间点上是一致的(不会看到一半的事务)
- First-Writer-Wins:若两个并发事务 T1, T2 都想写同一行,先获得写权的事务赢,后来者 abort
SI 可以解决的问题:
- 脏读(Dirty Read):✅ 不会读到未提交的数据
- 不可重复读(Non-Repeatable Read):✅ 读的是固定快照
- 大部分幻读(Phantom Read):✅ 快照是固定的
SI 无法解决的问题(异常):
写偏序(Write Skew):经典例子是两个事务都读了同一个表并各自更新了不同行,违反了整体的完整性约束,但因为没有直接的写写冲突,两者都能提交。
初始:doctor_on_call = {A: true, B: true},要求至少一人值班 T1 读取:发现 A=true, B=true,将 A 设为 false(A 不值班了) T2 读取:发现 A=true, B=true,将 B 设为 false(B 不值班了) 结果:A=false, B=false → 无人值班,违反约束,但 SI 下两者都提交成功
1.4 Serializable Snapshot Isolation(SSI)
SSI 是在 SI 基础上,通过在提交时做额外的冲突检测,将隔离级别提升到**可串行化(Serializability)**的方案。
SSI 的核心思想(基于依赖分析):
标准的 SSI 分析事务间的三种依赖关系并检测危险结构(danger triangle)。BusTub 的实现采用的是一种简化版 SSI:在提交时,检查本事务写的行是否被其他在本事务开始后提交的事务修改过,且这些行满足本事务曾经扫描过的谓词(scan predicate)。
即:检测 “幻读(Phantom)” 的发生,防止一类经典的不可串行化现象。
1.5 First-Writer-Wins 原则
BusTub 实现的是 First-Writer-Wins(先写者获胜) 策略:
- 若事务 T1 已经修改了某行(tuple_ts 变为 T1 的临时 ID),事务 T2 也想修改同一行
- T2 检测到
tuple_ts > T2.read_ts且tuple_ts ≠ T2.GetTransactionId() - T2 立即 abort(设置 TAINTED 状态,抛出异常)
- T1 继续正常执行
这与 2PL 的"后来者等待"不同,MVCC 不等待,直接 abort,适合短事务密集的 OLTP 场景。
二、BusTub MVCC 整体架构
2.1 版本链设计
BusTub 的 MVCC 采用 Undo Log 链式存储(也叫 Delta Storage / Diff-based Storage)。
TableHeap(最新版本,通常是正在进行中的事务或最后一次提交的结果)
↓ (通过 TransactionManager 中的 version_info_ 映射)
VersionUndoLink { prev_: UndoLink, in_progress_: bool }
↓ prev_
UndoLog₁ { ts_, is_deleted_, modified_fields_, tuple_, prev_version_ }
↓ prev_version_
UndoLog₂
↓
UndoLog₃ → INVALID (链尾)
关键设计决策:
- 最新版本在 TableHeap 中(不在 undo log 中),读当前版本最快
- undo log 存储的是"从当前版本回退一步的差异",而非完整快照
- 版本链越新越靠前,沿链向后找到越旧的版本
对比两种常见的版本存储方式:
| 存储方式 | 最新版本位置 | 历史版本位置 | 代表系统 |
|---|---|---|---|
| Undo Log(BusTub, InnoDB) | 主表(in-place) | 回滚段(差量) | MySQL, BusTub |
| Append-Only(MVTO) | 版本链最新节点 | 主表/版本链旧节点 | PostgreSQL(Heap-based) |
2.2 核心数据结构
TupleMeta(存储在 TablePage 中,每条 tuple 配套)
// src/include/storage/table/tuple.h
struct TupleMeta {
timestamp_t ts_; // 双重含义:
// < TXN_START_ID → 已提交事务的 commit_ts
// >= TXN_START_ID → 正在进行事务的临时 txn_id
bool is_deleted_; // 软删除标志(逻辑删除)
};
static constexpr size_t TUPLE_META_SIZE = 16; // 固定 16 字节
UndoLink(版本链指针)
// src/include/concurrency/transaction.h
struct UndoLink {
txn_id_t prev_txn_; // 指向拥有该 UndoLog 的事务 ID
int32_t prev_log_idx_; // 该 UndoLog 在事务 undo_logs_ 数组中的下标
auto IsValid() const -> bool { ... } // prev_txn_ != INVALID_TXN_ID
};
UndoLog(差量记录)
struct UndoLog {
bool is_deleted_; // 这一步操作是否是删除
std::vector<bool> modified_fields_; // 位图:哪些列在这一步被修改了
Tuple tuple_; // 只存 modified_fields_ 为 true 的列(稀疏存储)
timestamp_t ts_; // 这条 UndoLog 对应的事务提交时间
UndoLink prev_version_; // 指向更旧版本的 UndoLog
};
稀疏存储的意义: 假设一张 100 列的宽表,每次只更新 2 列,使用全量存储每次需要保存 100 列数据;使用稀疏存储(
modified_fields_位图 + 只存变化列)只需要存 2 列数据 + 100 位的位图,空间节省 ~98%。
VersionUndoLink(版本链头节点的包装)
// src/include/concurrency/transaction_manager.h
struct VersionUndoLink {
UndoLink prev_; // 指向最新 UndoLog 的链接
bool in_progress_; // 当前是否有事务正在修改此 tuple
static auto FromOptionalUndoLink(std::optional<UndoLink> undo_link) -> VersionUndoLink;
};
in_progress_ 的作用是一个"轻量级写锁"标记,防止并发写同一 tuple(详见 Task #4 并发实现)。
2.3 版本链存储的组织方式
// src/include/concurrency/transaction_manager.h
struct PageVersionInfo {
std::shared_mutex mutex_; // 保护此 Page 内所有 slot 的版本链头
std::unordered_map<slot_offset_t, VersionUndoLink> prev_version_;
};
// TransactionManager 成员
std::unordered_map<page_id_t, std::shared_ptr<PageVersionInfo>> version_info_;
设计思路:
- 不是全局一个大锁,而是以 Page 为粒度组织版本链头
- 每个
PageVersionInfo有独立的shared_mutex_,并发访问同一 Page 的不同 slot 时需要竞争同一锁(粒度介于全局锁和 slot 级锁之间) - 通过
RID = (page_id, slot_offset)定位到对应的VersionUndoLink
2.4 TXN_START_ID 常量
// src/include/common/config.h
static constexpr txn_id_t TXN_START_ID = 1LL << 62; // 极大的数
ts_ 字段复用了 timestamp_t 和 txn_id_t 两种语义:
ts_ < TXN_START_ID:已提交的事务时间戳(commit_ts),具体数值从 0 单调递增ts_ >= TXN_START_ID:正在进行的事务的临时 ID(txn_id = TXN_START_ID + 序号)
这样只需要一个 int64_t 字段,就能区分"已提交"和"未提交"两种状态,比用额外的 bool 字段更节省空间,也便于比较。
三、Task #1 — Timestamps 与 Watermark
3.1 任务概述
task1 主要是熟悉这部分相关代码,写的部分比较简单,总共实现两个部分:
- 事务管理器中创建事务,赋予时间戳,将其放入 watermark 中
- watermark 管理所有正在运行的事务,保存正在运行的事务的最小时间戳,创建事务时向其中添加事务时间戳,提交事务时从中删除
3.2 时间戳分配策略
BusTub 使用逻辑时间戳(Logical Timestamp),而非物理时钟:
事务 Begin 时:read_ts = last_commit_ts(当前最新提交的时间戳)
事务 Commit 时:commit_ts = ++last_commit_ts(原子递增获取新时间戳)
每个事务在开始时"拍下"一个快照时间戳(read_ts),此后只看 commit_ts ≤ read_ts 的已提交数据。Commit 时递增全局计数器获得唯一的提交时间戳。
auto TransactionManager::Begin(IsolationLevel isolation_level) -> Transaction * {
std::unique_lock<std::shared_mutex> l(txn_map_mutex_);
auto txn_id = next_txn_id_++;
auto txn = std::make_unique<Transaction>(txn_id, isolation_level);
auto *txn_ref = txn.get();
txn_map_.insert(std::make_pair(txn_id, std::move(txn)));
// 关键:read_ts = 当前最新提交时间戳(原子读取)
txn_ref->read_ts_ = last_commit_ts_.load();
// 注册到 Watermark 追踪器
running_txns_.AddTxn(txn_ref->read_ts_);
return txn_ref;
}
3.3 Watermark 的定义与作用
Watermark(水印) 是所有活跃事务(正在运行的事务)的 最小 read_ts。
活跃事务:T1(read_ts=5), T2(read_ts=7), T3(read_ts=9)
Watermark = min(5, 7, 9) = 5
Watermark 的核心用途:垃圾回收(GC)
commit_ts ≤ Watermark 的版本对所有活跃事务都不再需要(因为所有事务都能看到比它更新的版本),可以安全回收。
3.4 Watermark O(1) 均摊实现思路
关于这一部分的 O(1) 实现方法,利用事务管理器中的 last_commit_ts_,它赋予给所有创建的事务,并且是单调递增,在 commit 时 +1。这样便可以确定 watermark 中时间戳在一定的范围内,时间范围最大为 last_commit_ts_,最小为正在运行的事务中的最小时间戳,并且由于时间戳 +1 递增,watermark 也使用 +1 递增寻找符合的事务。
具体实现:除非 watermark 为空,否则添加时不修改 watermark 值,删除时判断是否还有时间戳为 watermark 的事务,没有就递增搜索,直到 commit_ts。
auto Watermark::AddTxn(timestamp_t read_ts) -> void {
if (read_ts < commit_ts_) {
throw Exception("read ts < commit ts");
}
// 若 map 为空(没有活跃事务),直接设置 watermark
if (current_reads_.empty()) {
watermark_ = read_ts;
}
++current_reads_[read_ts]; // 频率计数
}
auto Watermark::RemoveTxn(timestamp_t read_ts) -> void {
auto iter = current_reads_.find(read_ts);
if (iter == current_reads_.end()) {
throw Exception("read ts not found");
}
if (iter->second == 1) {
current_reads_.erase(iter); // 最后一个使用此 read_ts 的事务退出
} else {
--iter->second; // 还有其他事务使用相同 read_ts
}
// 若移除的是当前 watermark,需要更新 watermark
if (read_ts == watermark_ && !current_reads_.empty()) {
// 向前推进 watermark,找到下一个有活跃事务的 read_ts
// current_reads_ 是有序 map,可直接取 begin()->first,无需循环
}
}
实现优化点:
current_reads_是有序std::map,RemoveTxn的 watermark 更新可以直接取begin()->first作为新 watermark,无需循环线性扫描,更加高效。
四、Task #2 — 存储格式与顺序扫描
4.1 TupleMeta.ts_ 的完整语义
ts_ 值域分析:
[0, TXN_START_ID) → 已提交事务的 commit_ts(小整数)
[TXN_START_ID, MAX) → 进行中事务的临时 txn_id(极大整数)
可见性判断核心逻辑:
令 tuple_ts = tuple_meta.ts_
令 txn_ts = txn->GetReadTs()
令 my_txn_id = txn->GetTransactionId() // >= TXN_START_ID
情况1: tuple_ts <= txn_ts
→ tuple 已提交且时间 ≤ 当前快照,直接可见
情况2: tuple_ts == my_txn_id
→ tuple 是本事务自己修改的,可见(读自己写的数据)
情况3: tuple_ts > txn_ts && tuple_ts != my_txn_id
→ tuple 被一个更新的已提交事务或另一个未提交事务修改
→ 需要沿 undo log 链向后找到对当前快照可见的版本
→ 可能的情况:
3a: tuple_ts >= TXN_START_ID(另一个正在进行的事务修改)
3b: tuple_ts < TXN_START_ID 但 > txn_ts(另一个较新的已提交事务修改)
4.2 UndoLog 稀疏存储的实现细节
struct UndoLog {
bool is_deleted_; // true 表示"这步操作是删除"
std::vector<bool> modified_fields_; // 大小 = schema.GetColumnCount()
// modified_fields_[i] = true → 第 i 列在此 log 中有旧值
Tuple tuple_; // 只包含 modified_fields_ 为 true 的列
// 用 Schema::CopySchema() 生成子 schema 来解析
timestamp_t ts_; // 此 UndoLog 记录的版本对应的时间戳
UndoLink prev_version_; // 指向更旧的 UndoLog
};
示例: 一张 4 列的表 (a, b, c, d),事务将 b 和 d 从 (2, 4) 改为 (20, 40):
modified_fields_ = [false, true, false, true]
tuple_.data_ = [(b=2), (d=4)] // 只存修改了的列的旧值
// 解析时用 CopySchema([1, 3]) 生成 2 列 schema
版本链中 ts_ 的含义:
TableHeap tuple: ts_=TXN8(事务8临时id,表示事务8正在修改)
↓
UndoLog1: ts_=5(表示"若你想看 commit_ts=5 时的状态,apply 这个 log")
↓
UndoLog2: ts_=3
↓
INVALID(链尾,再往前没有版本记录)
读事务 T with read_ts=6 想读这行:TableHeap 的 ts_=TXN8 不可见,取 UndoLog1,ts_=5 ≤ 6 → apply 此 log 后的版本对 T 可见,返回 apply UndoLog1 后的 tuple。
4.3 ReconstructTuple — 元组重建
函数签名与语义:
auto ReconstructTuple(const Schema *schema,
const Tuple &base_tuple, // TableHeap 中的最新 tuple
const TupleMeta &base_meta, // 对应的元数据
const std::vector<UndoLog> &undo_logs // 从新到旧的 undo log 数组
) -> std::optional<Tuple>;
// 返回 nullopt 表示重建后的版本已被删除(即该历史版本不存在)
执行流程图:
base_tuple (TableHeap 当前版本)
│
▼ apply UndoLog₁ (最近的变更 → 还原这一步)
版本v₁
│
▼ apply UndoLog₂
版本v₂ ← 这可能就是我们需要的历史版本
│
▼ apply UndoLog₃
版本v₃(更古老的版本)
特别需要注意的点是对已删除数据的操作——执行前已删除、执行后已删除这两种情况,is_deleted 标志需要随 undo log 一起回退。
版本链遍历顺序:
新 ←————————————————→ 旧
TableHeap → UndoLog1 → UndoLog2 → UndoLog3 → INVALID
(最近的变更) (最早的变更)
ReconstructTuple 接收的 undo_logs 数组是新到旧顺序,apply 时需要正向遍历(先 apply 最新的 undo,再 apply 较旧的 undo),才能从 base_tuple 一步步回退到目标版本。
4.4 顺序扫描(SeqScan)可见性逻辑
顺着版本链扫描:如果时间戳满足条件(情况1或2)直接读取;否则顺着 undo log 版本链构建历史版本。
// SeqScan 中的使用(seq_scan_executor.cpp)
std::vector<UndoLog> undo_logs;
UndoLink undo_link = txn_manager->GetUndoLink(*rid).value_or(UndoLink{});
auto optional_undo_log = txn_manager->GetUndoLogOptional(undo_link);
// 收集足够多的 undo log,直到时间戳满足条件
while (optional_undo_log.has_value() && tuple_ts > txn_ts) {
undo_logs.push_back(*optional_undo_log);
tuple_ts = optional_undo_log->ts_;
undo_link = optional_undo_log->prev_version_;
optional_undo_log = txn_manager->GetUndoLogOptional(undo_link);
}
// 检查是否找到了满足条件的版本
if (tuple_ts > txn_ts) {
continue; // 整个版本链都比 txn_ts 新,此 tuple 对当前事务不可见
}
auto new_tuple = ReconstructTuple(&schema, *tuple, tuple_meta, undo_logs);
SERIALIZABLE 隔离级别处理: 构造 SeqScanExecutor 时若
isolation_level == SERIALIZABLE且存在filter_predicate_,需记录扫描谓词(txn->AppendScanPredicate),用于提交时VerifyTxn检测幻读。
| 情况 | 条件 | 处理 |
|---|---|---|
| 直接可见 | tuple_ts ≤ txn_ts | 直接使用 TableHeap 中的版本 |
| 本事务自写 | tuple_ts == txn->GetTransactionId() | 直接使用(读自己写的数据) |
| 需要回溯 | tuple_ts > txn_ts && tuple_ts ≠ my_txn_id | 遍历 undo log 链重建历史版本 |
五、Task #3 — MVCC Executors
task3 是这部分的核心内容,实现增删改查这些基本操作在事务下的执行过程以及事务的提交。
5.1 Insert
向 table 中插入数据即可,需要同时向 write_set 中传入对应 rid(后续会在 commit 中统一修改对应 Tuple 的时间戳,表明该 Tuple 没有事务在执行;也可以用于 Abort 中取消对 Tuple 的操作)。
auto InsertExecutor::Next([[maybe_unused]] Tuple *tuple, RID *rid) -> bool {
if (has_inserted_) { return false; } // 确保只执行一次
has_inserted_ = true;
int count = 0;
auto txn = exec_ctx_->GetTransaction();
auto txn_mgr = exec_ctx_->GetTransactionManager();
auto catalog = exec_ctx_->GetCatalog();
auto table_info = catalog->GetTable(plan_->GetTableOid());
auto indexes = catalog->GetTableIndexes(table_info->name_);
while (child_executor_->Next(tuple, rid)) {
InsertTuple(txn, txn_mgr, table_info, indexes, *tuple);
++count;
}
// 输出受影响行数
std::vector<Value> result{{TypeId::INTEGER, count}};
*tuple = Tuple{result, &GetOutputSchema()};
return true;
}
5.2 Commit
commit 主要是两个操作:
- 修改
last_commit_ts_以及当前事务的commit_ts - 读取
write_set,修改事务执行过写操作的 Tuple 的时间戳为当前事务提交的时间戳commit_ts
auto TransactionManager::Commit(Transaction *txn) -> bool {
std::unique_lock<std::mutex> commit_lck(commit_mutex_); // 串行化提交
// commit_ts = ++last_commit_ts_
// 遍历 write_set_,将所有相关 tuple 的 ts_ 改为 commit_ts
// running_txns_.RemoveTxn(txn->read_ts_)
return true;
}
两把锁的用意:
commit_mutex_:序列化提交操作,确保last_commit_ts_的递增是原子性的,避免两个事务获得同一个 commit_tstxn_map_mutex_:保护txn_map_和 Watermark 的更新
5.3 Update && Delete
Update 和 Delete 操作差不多,都是根据读取的数据进行操作,需要判断读取的数据时间戳,有三种情况:
- Tuple 时间戳 ≤ 当前事务时间戳:表明这个 Tuple 没有被当前事务之后的事务操作或正在被其他事务操作,直接操作 Tuple,然后写入 UndoLog、写入 writeSet、更新 VersionLink
- Tuple 的时间戳等于当前事务 ID:表明这个 Tuple 之前被当前事务操作过,需要更新之前提交的 UndoLog——UndoLog 合并
- 其他情况:包括时间戳比当前事务大(被当前事务之后的事务操作过了)、已经有其他事务在操作了——这两种情况都是写写冲突
UndoLog 合并(第一次写——创建):
当 tuple_meta.ts_ ≤ txn->GetReadTs()(本事务第一次写这条 tuple):
// 计算哪些列发生了变化
std::vector<bool> new_modified_fields;
std::vector<Value> new_modified_values;
std::vector<uint32_t> cols;
for (uint32_t i = 0; i < schema.GetColumnCount(); ++i) {
auto old_value = cur_tuple.GetValue(&schema, i);
if (old_value.CompareEquals(new_values[i]) == CmpBool::CmpTrue) {
new_modified_fields.emplace_back(false); // 未变化
} else {
new_modified_fields.emplace_back(true); // 已变化,记录旧值
new_modified_values.push_back(old_value);
}
}
// 创建 UndoLog 并追加到事务的 undo_logs_ 数组
undo_link = txn->AppendUndoLog(UndoLog{
tuple_meta.is_deleted_,
new_modified_fields,
new_modified_tuple,
tuple_meta.ts_, // 旧版本的时间戳
undo_link // 指向更旧的版本
});
UndoLog 合并(同一事务再次写):
当 tuple_meta.ts_ == txn->GetTransactionId()(本事务已经写过这条 tuple)时,合并现有 UndoLog 而非新建:
// 目标:undo_log 始终记录"从事务开始前的状态到当前状态的完整差异"
// 事务第一次写:a=1→2 → undo_log: {a: 1}(记录 a 的原始值)
// 事务第二次写:a=2→3, b=5→6 → undo_log 合并为: {a: 1, b: 5}
// (a 的原始值仍是 1,b 新加入,原始值是 5)
// 若不合并而是新建:
// undo_log1: {a: 2, b: 5} → undo_log0: {a: 1}
// 回滚时需要 apply 两次,链条更长
txn->ModifyUndoLog(undo_link.prev_log_idx_, UndoLog{
undo_log->is_deleted_,
merged_modified_fields,
merged_modified_tuple,
undo_log->ts_,
undo_log->prev_version_
});
Update 两阶段执行——解决 Halloween Problem:
Update 的实现分为两个明确的阶段:
阶段一(收集): while(child->Next()) → old_tuples, new_tuples, rids 全部收集
阶段二(写入): 遍历收集好的数据,执行实际的写操作
经典问题描述:假设对每个薪资 < 1000 的员工加薪 10%,若边读边写:
- 扫描到 Alice(薪资 900),更新为 990
- 表迭代器继续推进,再次扫描到 Alice(新薪资 990,仍 < 1000)再次更新为 1089
- 循环往复,Alice 的薪资无限增长
先将所有满足条件的 (old_tuple, new_tuple, rid) 全部收集,然后批量写入,避免读到自己刚写的数据。
5.4 Stop-the-world Garbage Collection
垃圾回收实现比较简单,主要利用 task1 中的 watermark:对于所有已提交的事务,如果它的提交时间比 watermark_ts 小或者 undo_log 为空,这两种情况都表明这个事务不再被访问,直接回收即可,总共就一个循环加上一个判断。
- watermark 本来就是为了垃圾回收机制而设计的
- undoLog 为空的事务:不会有版本回退访问到的情况
- 提交时间戳小于 watermark 的事务:undoLog 是存放修改之前的数据状态,正在运行的事务不会需要这段历史了(仔细想一想,undoLog 是存放修改之前的数据状态)
六、Task #4 — Primary Key Index
task4 中引入索引,而且是单索引,这时候对版本链的操作发生了变化。由于索引指向的地址不会发生变化,对于同一个索引指向的 Tuple 存在删除数据后又重新插入的情况,同时在插入时需要判断索引冲突,引入了索引版本链才算完整(从 Reconstruction 的操作来看,存在从删除状态到未删除状态)。
兼容性说明: 由于可扩展哈希不支持多索引指向同一个 Tuple,Project4 和 Project3 不兼容。底层实现也有冲突:Project3 更新操作是删除原数据、创建新的 Tuple(Tuple 大小不固定),但 Project4 是原地修改(Tuple 大小固定)。
6.1 Inserts(含并发)
这一部分便是重构 Insert,考虑存在索引的情况。大致实现(包括并发):
- 判断索引冲突:有就直接报写写冲突,同时记录插入的 Tuple 的索引是否存在
- 索引存在时:判断是否存在写写冲突,即索引指向位置的 Tuple 是否已删除且没有其他事务正在操作,满足条件就直接插入,修改 versionLink、UndoLog 以及 writeSet
- 索引不存在时:和原本的 Insert 一样,插入数据,更新 VersionLink(第一次插入没有 undoLog),然后创建对应索引
- 并发处理关键:在步骤 3 中进行索引创建时检查冲突——如果有多个指向同一个索引的 Tuple 插入,便会发生竞争插入,最终只有一个插入成功,其余全部失败
RID 复用的重要性:
当一行数据先被删除再被插入相同主键时,BusTub 复用原来的 RID:节省空间,维护索引一致性,简化 GC。
提交状态: (deleted, ts=5) → UndoLog₁(is_deleted=false, ..., ts=3) → INVALID
↑ 旧的有效数据
插入后: (value=X, ts=TXN8) → UndoLog_new(is_deleted=true, ts=5) → UndoLog₁ → INVALID
↑ 新插入的 UndoLog 记录"我是在删除状态上覆盖的"
主键约束与并发插入:
场景:两个事务同时插入相同主键
T1 begin(read_ts=5):
InsertTuple(key=X) → 索引插入: key=X → RID=1, tuple_ts=TXN1
T2 begin(read_ts=5):(与 T1 并发)
InsertTuple(key=X)
→ ScanKey 找到 RID=1,tuple_ts=TXN1 > read_ts=5 && != T2的id → 写写冲突 → abort T2
这里体现了 First-Writer-Wins:T1 先完成索引插入,T2 看到冲突后 abort。
6.2 Index Scan, Deletes and Updates(含并发)
由于引入了索引,根据 project3 中实现的优化,这里会调用 IndexScan,需要修改 IndexScan 使其能够适应事务的操作,实现大致和 SeqScan 差不多。Delete 和 Update 操作没有太大变化,主要是由于索引存在,版本链和之前不同,存在对已删除的地方进行插入,所以对 undoLog 和 versionLink 的操作有小部分修改。
并发实现——原子自旋锁设计:
并发使用 versionLink 来实现原子操作。实现的关键是 UpdateVersionLink 和 GetVersionLink 函数中有锁,由 txn_manager 管理,保证所有事务对 versionLink 的操作是原子的(原子操作是实现并发的关键——执行过程不会被其他事务插队)。这类似于操作系统中利用底层原子操作来实现并发的方法——自旋检查,检查过程是原子的,通过这部分实现并发。
具体实现步骤:
- 先检查写写冲突,有写写冲突直接退出
- 自旋检查
version_link中in_progress是否为 false(表明没有其他事务在操作该 rid 指向的 tuple) - 调用
UpdateVersionLink函数,传入检查函数,原子地检查是否已经有其他事务获取了in_progress,然后修改in_progress为 true,其他事务只能自旋等待。如果执行失败跳转步骤 1 重新检查并进入自旋等待 - 再次检查写写冲突(double-check,这部分貌似没有被执行过,但其他大佬都写了,我也写一下)
- 个人实现要点(其他大佬没写的部分):
- versionLink 始终非空:在最开始插入时,原本的设计 versionLink 为空,但这样自旋判断存在问题(没有 versionLink 就没有
in_progress)。因此在一开始就插入 versionLink,让它指向一个不存在的 UndoLog(默认值),通过GetUndoLogOptional函数来判断是否到版本链终点,而不是用 UndoLog 指向为空来表示空链。这其实也是我最开始就有的想法——让 versionLink 的指针指向为空表示没有 UndoLog,而不是 UndoLog 指向为空,这样写也更舒服。 - commit 时统一释放写锁:在 commit 时统一从 write_set 中修改 versionLink 的
in_progress为 false,这样和 write_set 同步了,不需要额外的数据结构,也防止被其他事务插队,正好符合设计。
- versionLink 始终非空:在最开始插入时,原本的设计 versionLink 为空,但这样自旋判断存在问题(没有 versionLink 就没有
6.3 Primary Key Updates
主键更新也是大坑,倒是没有并发,但是是单索引,不符合 Project3 的测试。实现的关键点:
- 首先获取所有的数据
- 对其进行更新操作,判断是否有索引冲突(可以通过 Expression 中修改的位置下标来判断是否有索引变化)
- 统一删除原本的数据(先获取所有数据再统一删除,防止影响自身的读取)
- 插入新的位置
这里 Delete 然后 Insert 同一行时,InsertTuple 会走 RID 复用 路径,因为 ScanKey 仍能找到旧的索引项对应的已删除 tuple。
七、Bonus Task #1 — Abort
7.1 实现思路
Abort 主要通过 write_set 将事务操作过的数据恢复原本的状态,同时回退 versionLink 和 UndoLog。这部分主要是针对前面写写冲突抛出的 TAINTED 的事务,将其所做的操作复原。
关键点:
- 通过
write_set_精确知道"我修改了哪些行",不需要全表扫描 - 对每行,通过第一个 UndoLog(本事务创建的)进行还原
- 若没有 UndoLog(新插入的 tuple),直接标记为删除并设 ts_=0
- undo_log 本身不会从事务中删除,由 GC 负责
void TransactionManager::Abort(Transaction *txn) {
std::unique_lock<std::mutex> commit_lck(commit_mutex_);
// 遍历 write_set_
// 对每行:通过第一 UndoLog 还原,或直接删除(新插入行)
running_txns_.RemoveTxn(txn->read_ts_);
}
7.2 并发控制方式的变化
这里更重要的一个变化是:并发的实现方式发生了改变。原本是利用 in_progress 来实现并发,从这里开始使用底层的 page 锁来实现并发了,原先的 versionLink 锁的部分可以删除了,并发的实现也变得更简单了。
八、Bonus Task #2 — Serializable Verification
8.1 实现思路
这一部分主要检查在事务并发过程中,是否存在并发过程中事务执行顺序不同导致不同的结果——即序列化的正确性,如果存在这种情况就需要进行 Abort。主要实现 VerifyTxn 函数,检查提交在当前事务创建之后的已提交事务中是否存在和当前事务有序列化冲突的情况。
8.2 SSI 检测原理
检测逻辑: 在本事务 read_ts 之后提交的其他事务,是否修改了本事务扫描谓词覆盖的数据行?
事务时间线:
T1 begin(read_ts=5) ─────────────── T1 commit
T2 begin ──────── T2 commit(commit_ts=7)
T2 的 write set: {row_A}
T1 的 scan predicates: {table=employees, predicate=(salary < 10000)}
VerifyTxn 检测:
row_A 在 commit_ts=7 时是否满足 (salary < 10000)?
如果满足 → T1 扫描时"本应"看到这行变化 → 幻读 → abort T1
| 异常类型 | SI | SSI (BusTub 实现) |
|---|---|---|
| 脏读 | ✅ 防止 | ✅ 防止 |
| 不可重复读 | ✅ 防止 | ✅ 防止 |
| 丢失更新 | ✅ 防止(First-Writer-Wins) | ✅ 防止 |
| 写偏序 | ❌ 不完全防止 | ✅ 防止(谓词检测) |
| 幻读 | 部分防止 | ✅ 防止 |
| 额外开销 | 无 | Commit 时 VerifyTxn(O(txn×writes×predicates)) |
8.3 VerifyTxn 的局限性
保守性(False Positive):只检测"写集 × 谓词"的交集,而非精确的循环依赖图,可能误判(abort 了实际上可串行化的事务)
T2 commit_ts=7:UPDATE employees SET dept='HR' WHERE id=42 T1 scan predicate:dept='Engineering' row_42 在 commit_ts=7 时 dept='Engineering' → VerifyTxn 返回 false,T1 abort 但实际上先 T1 后 T2 完全可以串行化,不是真正的冲突性能开销:需要遍历
txn_map_中所有已提交事务(O(n))× 写集大小 × 谓词数量,高并发时开销显著谓词粒度粗:只记录 SeqScan/IndexScan 时的谓词,不记录点查、Join 等操作的访问集,可能漏掉部分冲突
九、事务完整生命周期
9.1 数据流图
Begin()
└── read_ts = last_commit_ts(原子读)
└── txn_id = next_txn_id_++
└── 加入 txn_map_,注册到 Watermark
执行阶段(Read/Write)
└── Read: 可见性检查 → 按需 ReconstructTuple
└── Write: 冲突检测 → 更新 TableHeap → 创建/合并 UndoLog → 记录 write_set_
Commit()
└── [commit_mutex_] commit_ts = ++last_commit_ts
└── write_set_ 中所有 tuple: ts_ = commit_ts
└── VersionLink.in_progress = false(释放"写锁"标记)
└── running_txns_.RemoveTxn(read_ts)
Abort()
└── 遍历 write_set_,通过 UndoLog 还原所有修改
└── 无 UndoLog 的 tuple → is_deleted=true, ts_=0
└── running_txns_.RemoveTxn(read_ts)
GarbageCollection()
└── watermark = running_txns_.GetWatermark()
└── 从 txn_map_ 删除 commit_ts < watermark 的已完成事务
9.2 一条 tuple 的版本演变示例
初始状态(commit_ts=2):
TableHeap: (a=1, b=5), ts_=2, is_deleted_=false
version_info_: prev_ = INVALID
T1(read_ts=2) 执行 UPDATE a=10:
创建 UndoLog: {is_deleted_=false, modified_fields_=[true,false], tuple_=(a=1), ts_=2, prev_=INVALID}
TableHeap: (a=10, b=5), ts_=TXN1
version_info_: prev_ → UndoLog_T1
T1 Commit (commit_ts=5):
TableHeap: (a=10, b=5), ts_=5
T2(read_ts=5) 执行 DELETE:
创建 UndoLog: {is_deleted_=false, modified_fields_=[true,true], tuple_=(a=10,b=5), ts_=5, prev_→UndoLog_T1}
TableHeap: ts_=TXN2, is_deleted_=true
version_info_: prev_ → UndoLog_T2 → UndoLog_T1
T2 Commit (commit_ts=8):
TableHeap: (a=10, b=5), ts_=8, is_deleted_=true
T3(read_ts=4) 读这行:
tuple_ts=8 > read_ts=4 → 需要重建
collect: UndoLog_T2(ts_=5>4) → UndoLog_T1(ts_=2≤4), 停止
apply UndoLog_T2: 撤销 T2 的删除 → (a=10, b=5, deleted=false)
结果: (a=10, b=5) 可见(T1 的修改对 T3 可见,T2 的删除对 T3 不可见)
思考
到此 bustub 23fall 的 4 个 project 已经圆满完成,所有分数已经拿齐,能做的优化也基本做了,除了 project3 的 LeaderBoard,其他的都做了,也取得了不错的成绩。接下来按照安排是去实现 tinykv,可能也会写一写文章吧,还有 bustub 24fall 可能也会去做,稍微瞄了一眼,24fall 也改了不少,而且 B+树的实现是必须要去做的。总体感觉 bustub 一年比一年难了,也更加完整了,也是变得越来越好了,希望这门课程变得越来越好吧。通过这 4 个 project 也是学到了很多东西,对 C++、对数据库、对代码能力都是巨大的提升,有兴趣的同学都可以来写一写,还是挺不错的。
最后,感谢 CMU 15445 的老师和助教们的辛勤付出。
考虑到网上实现最后这部分内容的文章比较少,代码也是没有,我把我的代码放在这,这部分课程也是即将结束,应该也没几个人写了,有兴趣的同学可以参考一下。